Policy Gradient
action-value function 은 action 선택에 더 이상 활용되지 않지만만 policy parameter vector 를 학습하는데 사용될수는 있음
- 시간 의 state 에 위치하는 agent 가 parameter 를 통해 를 선택할 확률을 의미
- 를 선택할 때, 학습된 value function 을 사용한다면, weight vector 는 가 됨
- Policy parameter 는 performance 를 최대화하는 방향으로 나아간다.
- 는 에 대한 gradient of the performance measure
- Policy 와 value 둘 다에 대한 적절한 학습 방법을 actor-critic methods 라 부른다.
- Actor: Learned policy
- Critic: learned value Function (일반적으로 state-value function 을 의미한다.)
B) Why Policy Gradients?
Deep Q Learning 은 action space 가 크거나 연속일 경우 잘 동작하지 않는다.
예를 들어 자동주행차는 각 상태에서 (거의) 무한한 가짓수의 행동 (바퀴를 15°, 17.2°, 19.4° 회전 …) 을 선택을 할 수 있다. 이 경우에 가능한 행동에 대하여 Q 값을 구해야 된다.
Policy Gradient 는 value 를 통해 action 을 고르는 것이 아니라 action 자체를 선택한다. 그래서 state 에 대해서 정확한 값을 계산할 필요가 없다.
다시 말하면, Policy Network 는 가능한 모든 action 들에 대한 확률 행렬을 반환하기 때문에, 이 확률에 기반하여 action 을 무작위로 선택하거나 greedy 하게 선택 가능하다.
결과적으로 Exploration 과 Exploitation 에 대한 trade-off 균형을 직접 맞출 필요가 없어지므로, perceptual aliasing 문제를 해결할 수 있다.
C) Disadvantage of Policy Gradients
- Local optimum 정책 경사는 많은 상황에서 전역 최적점이 아닌 지역 최적점에 수렴합니다.
- 느린 학습 속도 항상 최고점에 도달하려는 딥 Q- 러닝과 달리, 정책 경사는 천천히 수렴한다. 따라서 학습하는 데 더 오랜 시간이 걸릴 수 있습니다.
D) Policy Approximation and Its Advantages
- state-action pair 에 대해 로 수치적인 선호도를 나타낼 수 있고, 각 상태에서 가장 높은 선호를 가지는 행동에 가장 높은 선택 확률이 주어진다.
- 이런 종류의 방법을 Softmax in action preferences 라 한다.
- 이러한 선호도는 임의의 형태로 parameter 화 시킬 수 있는데, 이때 는 가중치를 포함하는 vector 다.
- 단순히 선형 함수의 형태로 다음과 같이 표현할 수 있다.
-
- 여기서 는 단순한 feature vector 이다.
- soft-max 방식을 통해 policy 를 parameterize 할 때의 장점
-
- approximate policy 가 점점 더 deterministic policy 에 가까워 진다.
- 반대로, -greedy 방식은 언제나 의 확률로 임의의 행동을 선택한다.
-
- 임의의 확률로 행동을 선택하게 하는 것을 가능하게 한다.
- optimal 정책이 stochastic 정책일지도 모른다 (가위바위보 게임 처럼)
- Policy parameterization 사용의 가장 중요한 이유 중 하나는 강화 학습의 optimal policy 형태를 찾기 위해 사전 지식을 제공해줄 수 있다는 점이다.
E) The Policy Gradient Theorem
- policy parameterization 을 이용하면 action 을 선택할 확률이 parameter 에 의해 부드럽게 변한다.
- 반면 -greedy 선택 방법은 추정하는 action 값의 미약한 변화가 급격한 action 선택 확률의 변동을 만들어낸다.
- 이러한 이유로 action-value 방식보다 policy-gradient 가 더 강력한 수렴성을 보장할 수 있다.
- Episodic 문제에서 성능 지표 (performance measure) 은 다음과 같이 정의된다.
- 항상 똑같은 state (non-random) 에서 시작한다고 가정하였다.
- 는 에 따라 결정되는 정책인 에 대한 true value function 이다.
- policy gradient theorem
- policy parameter 에 대한 performance 의 gradient 는 policy gradient theorem 에 의해서 다음과 같이 표현된다.
- 여기서 gradients 는 의 원소들에 대한 partial derivatives 의 column vectors 를 나타낸 것이다.
- 또한, 는 에 대한 policy 를 의미하고, 는 비례한다는 의미이다.
- 분포 는 policy 하에서의 on-policy distribution 이다.
-
REINFORCE: Monte Carlo Policy Gradient
-
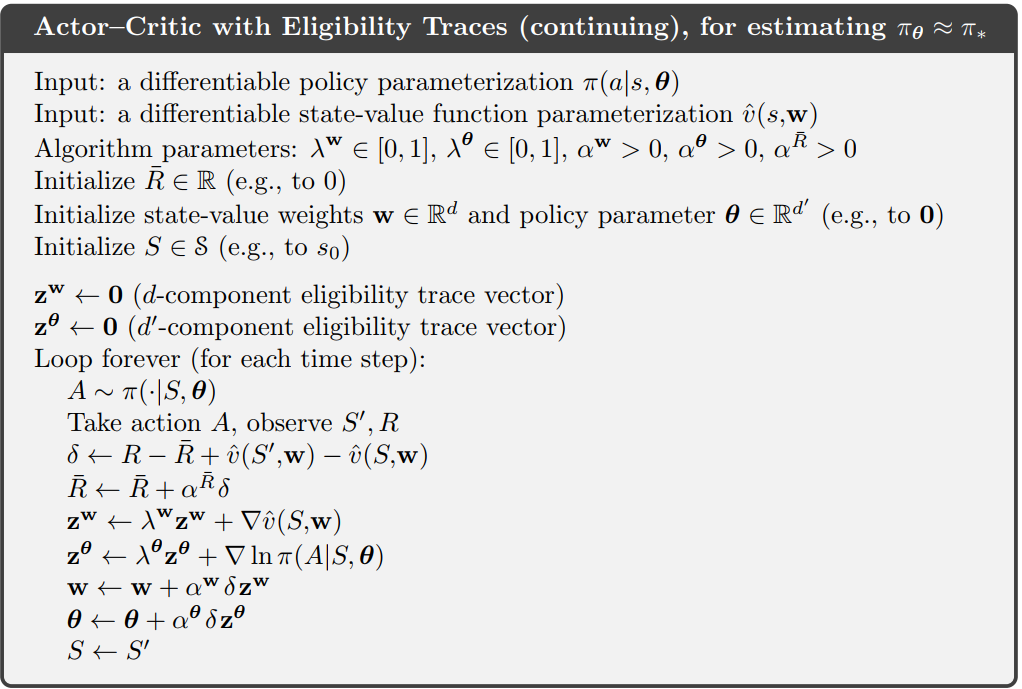
Actor–Critic Method
-
Policy Gradient for Continuing Problems
- episode boundaries 가 없는 연속 문제에서는 매 time step 마다 보상의 평균 비율에 대한 performance 를 정의할 필요가 있다.
-
Policy Parameterization for Continuous Actions
- Continuous actions 에서는 많은 actions 에 대해 선택할 확률보다는 확률 분포에 대한 통계 모델을 학습한다.
- Gaussian 분포의 경우 와 를 찾아내는 parameter 를 두 개 활용한다.
- and
- 표준 편차 의 경우 항상 양수여야 하므로, 선형 함수의 exponential 을 활용하는 것이 좋다.