Q-learning
Q-Learning 은 model-free 강화 학습 알고리즘이다. 환경에 대한 모델이 필요없다는 점에서 model-free 라는 prefix 가 붙었다.
또 Q-Learning 을 부르는 다른 이름은 off-policy temporal difference Control 이다. off-policy 라 불리는 이유는 exploitation 을 위한 greedy policy 가 하나 있고, exploration 을 위한 -greedy 와 같은 또 다른 policy 가 존재하기 때문이다.
에서 유도되는 policy 에 상관없이 를 통해서 최적의 action-value function 를 통해 를 update 한다.
A.1) Algorithm
state-action 조합에 대한 quality(q-value) 를 저장하고 있는 함수를 사용한다.
학습을 시작하기 전에, 값은 임의로 초기화된다. 그리고 각 time 마다 action 을 선택하고 reward 를 받은 뒤, 새로운 state 로 진입한다. 이후 값을 업데이트 하게된다.
A.1.1) Core
알고리즘의 핵심은 value iteration update 인 Bellman Equation 에 있는데, 식은 아래와 같다 (Incremental Implementation 참조).

위 식을 풀었을 때, 값은 세 요소에 대한 합으로 생각할 수 있다.
- : learning rate 에 의해 가중된 현재 값을 의미한다. learning rate 가 에 가까울 수록 값은 더욱 빠르게 변한다.
- : 에서 를 선택했을 때 얻어지는 보상값 . 이 값도 에 의해 가중된다.
- : state 로 부터 얻어지는 최대 reward
모든 마지막 state 의 값은 절대 업데이트 하지 않고, 일반적으로 값으로 설정한다.
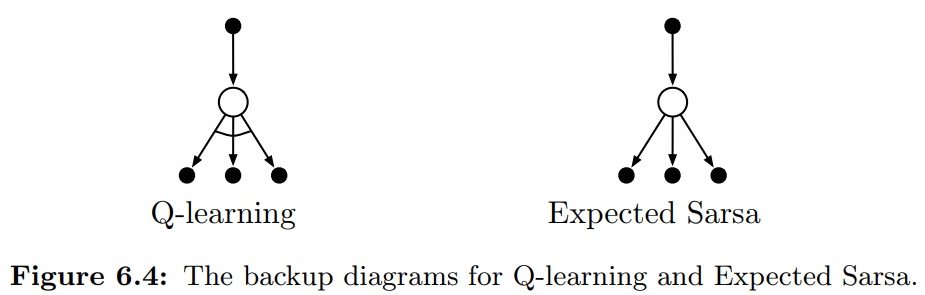
A.1.2) Figures
algorithm
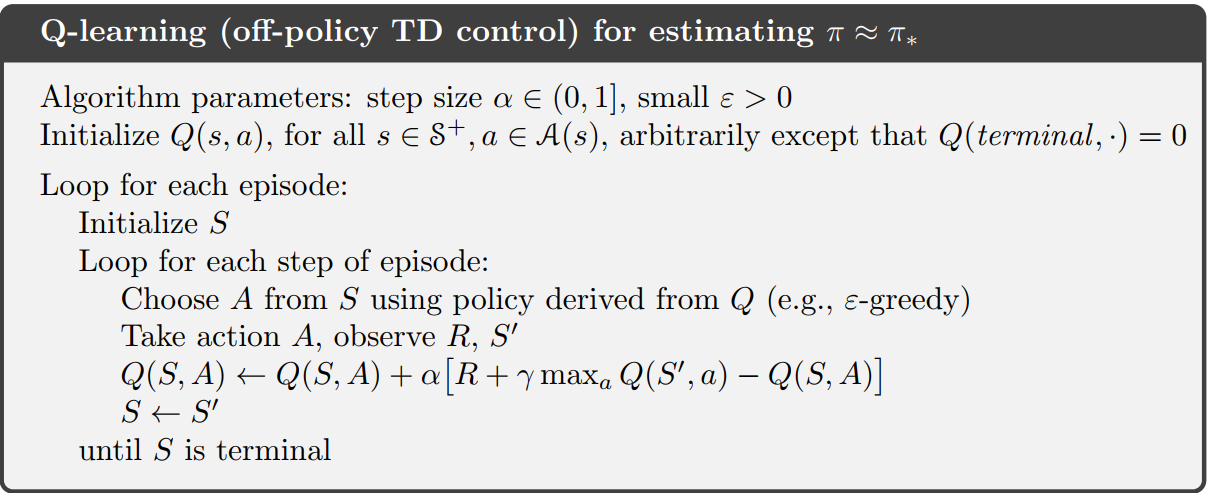
Diagram (vs. SARSA)
B) Double Q-learning
기존 Q-learning 은 동일한 Q 함수를 통해 평가와 행동 선택을 진행하므로 종종 action value 에 대한 과추정을 하여 학습 속도를 느리게한다.
Double Q-Learning 은 이러한 이슈를 해소하기 위한 방법으로, 평가와 행동 선택을 서로 다른 policy 를 통해 수행한다.
두 policy 와 를 학습하는 방법은 아래와 같다. 식을 보면 의 입장에서 봤을때 행동 선택은 의 값을 기반으로 진행하고 (), 그 행동에 따른 value 평가는 에서 수행하여 (), 업데이트 식에 활용하게 된다.
